

デアゴスティーニ Robi(ロビ) レビュー
ちょっと気になるデアゴスティーニの「Robi(ロビ)」のレビューをご紹介します。
毎週少しずつロビを作り上げていくのが楽しく、子供の頃にプラモデルを作った懐かしい記憶が蘇りますよ♪

【第16号】慣れた作業だが油断は禁物・・・

第16号のロビ。今号は「左前腕フレームにサーボモーターを取り付ける」です。

今週の特集は、ソフトウエア開発のために生まれたロボット「PR2」。今までご紹介してきたロボットととは異なり、ロボットのソフトウエア開発者や研究者のために作られたロボットです。ロボットを全て一から作っていると手間と時間がいくらあっても足りないので、完成度の高いロボットと基本ソフトウエアの環境を最初からそろえることが狙いだそうです。

今週の記事で気になったのは、脚を伸ばして自然な姿で動く構造を解説していた部分です。昔のロボットはカクカクとした不自然な歩行でしたが、最近は脚を伸ばして人間に近い歩行を実現しているロボットが登場しています。その先駆けロボットが特許技術「SHIN-Walk」を搭載した「クロイノ(写真の黒いロボット)」。特許技術「SHIN-Walk」はロビにも搭載されるはずなので、今から楽しみですね。
16号のロビを組み立て
16号の組み立て箇所。右肩サーボのテストを行い、IDを書き込みます。
16号のパーツ。サーボモーター(左前腕用)1つです。パーツが少なくて少々寂しいですが、もう慣れてきました。
サーボにサーボケーブルを接続する
以下、以前のサーボモーター作業と同じですが、簡単にご紹介しておきます。

サーボモーターを用意し、ネジを全て抜きます。ネジを抜いたら、裏ぶたをゆっくり外します。

前号で作成したサーボケーブルを用意し、片方のコネクターを基板に取り付けます。
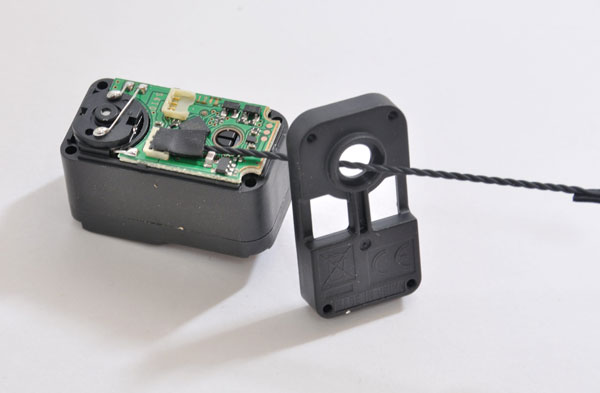
サーボケーブルを裏ぶたの丸い穴に通して、

最初に取り外したネジで再度固定します。
サーボIDを書き込む
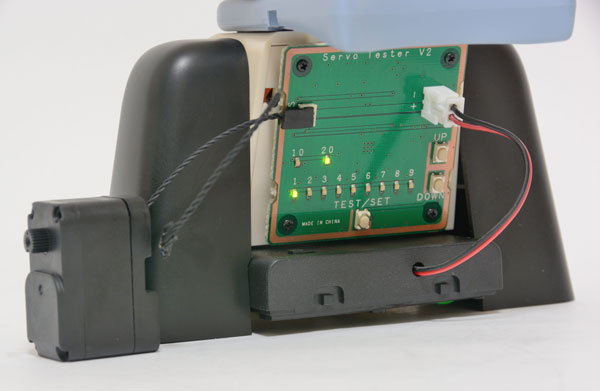
ロビ本体の背中に搭載している基盤にサーボモーターを接続し、サーボID『21』を書き込みます。
サーボモーターを取り付ける

サーボモーターにサーボIDを書き込み後、サーボモーターを取り外します。写真のように、先週15号で作成した左前腕フレームを取り付けてネジ止めすれば完成!

左前腕にサーボモーターを取り付けた状態。次号の作業で、ひじから先はほぼ完成します。
![]() ロビが気になる方は、
ロビが気になる方は、週刊ロビ(デアゴスティーニ公式ページ)をご参照ください。
【第15号】いよいよ左前腕に突入!<< >>【第17号】 左前腕をコツコツ作る