デアゴスティーニ Robi(ロビ)のレビューをご紹介!デアゴスティーニ Robi(ロビ)の購入を検討されている方は、ご参考にどうぞ。


デアゴスティーニ Robi(ロビ) レビュー
ちょっと気になるデアゴスティーニの「Robi(ロビ)」のレビューをご紹介します。
毎週少しずつロビを作り上げていくのが楽しく、子供の頃にプラモデルを作った懐かしい記憶が蘇りますよ♪

【第19号】 左上腕フレームにサーボモーターを取り付ける
第19号のロビ。

今週の特集は、ロボット専業メーカーが作ったルンバです。有名ですね。
19号のロビを組み立て
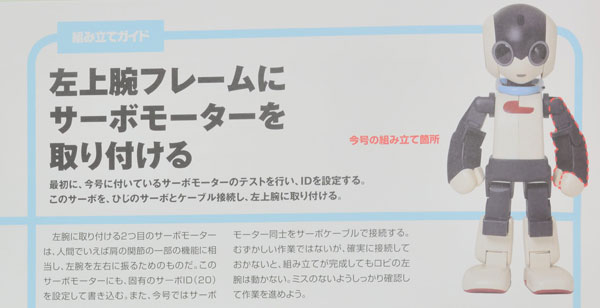
19号の組み立て箇所。左上腕フレームにサーボモーターを取り付けます。
19号のパーツ。サーボモーターだけと少々寂しい。
サーボモータの組み立て
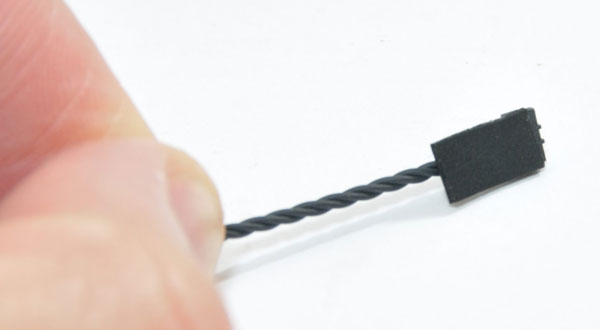
18号に付属していたサーボケーブルを用意し、コネクタの裏表を確認します。表面に保護シールを貼ります。

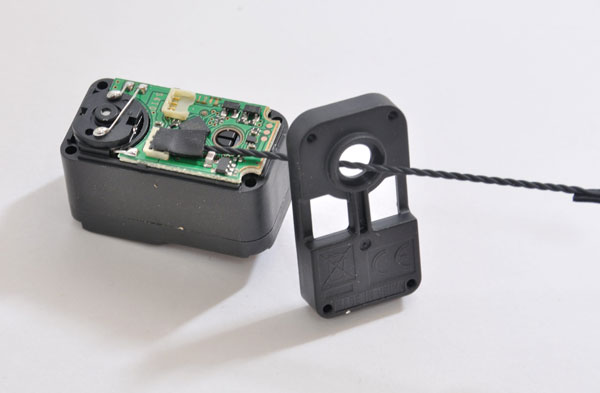
サーボモーターを用意し、シャフト面にあるネジをドライバーでゆるめて取り外します。
保護シールを貼ったサーボケーブルを用意し、片方のコネクターを基板のコネクターの1方(どちらでも可)に、真上から抑えて接続します。

外した裏ふたを取り付けて、ネジ止めすればOKです。
サーボの動作をテストする
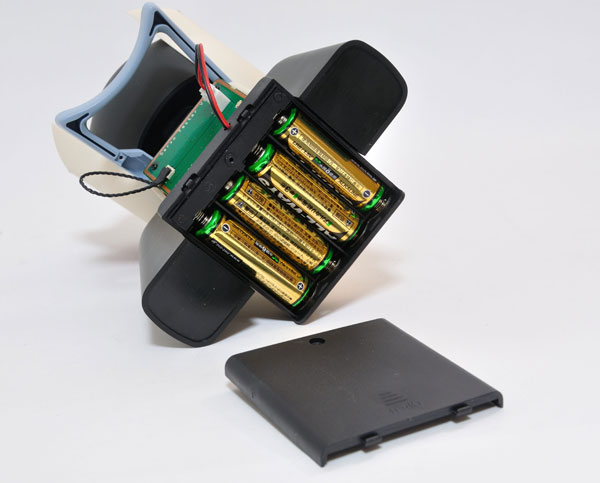
電池を入れて、
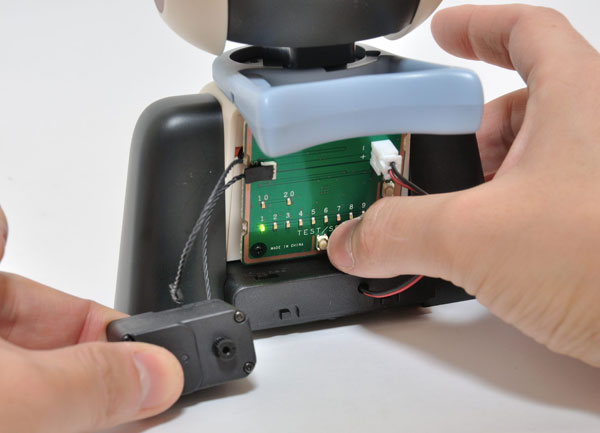
先ほど組み立てたサーボモーターをテストボードに取り付けて、電源スイッチをONします。全てのLEDが2回点滅した後に、「UP」スイッチを押して、LEDの「20」が点灯した状態にします。「TEST/SET」スイッチを長押しすると約3秒後に書き込み完了します。これでサーボIDの設定OKです!

前号で作成した左腕にサーボモーターをネジ止めします。これで完成。
![]() ロビが気になる方は、
ロビが気になる方は、週刊ロビ(デアゴスティーニ公式ページ)をご参照ください。
【第18号】 左ひじに左上腕フレームを取り付ける<< >>【第20号】 左上腕に肩のパーツを取り付ける