

僨傾僑僗僥傿乕僯丂Robi乮儘價乯 儗價儏乕
偪傚偭偲婥偵側傞僨傾僑僗僥傿乕僯偺乽Robi乮儘價乯乿偺儗價儏乕傪偛徯夘偟傑偡丅
枅廡彮偟偢偮儘價傪嶌傝忋偘偰偄偔偺偑妝偟偔丄巕嫙偺崰偵僾儔儌僨儖傪嶌偭偨夰偐偟偄婰壇偑慼傝傑偡傛侓

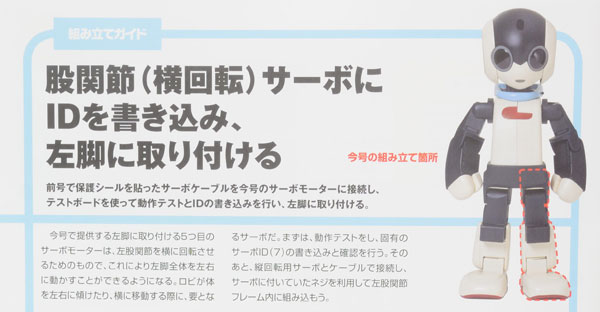
亂戞係俆崋亃 屢娭愡乮墶夞揮乯僒乕儃偵ID傪彂偒崬傒丄嵍媟偵庢傝晅偗傞
戞係俆崋偺儘價丅崱崋偼乽屢娭愡乮墶夞揮乯僒乕儃偵ID傪彂偒崬傒丄嵍媟偵庢傝晅偗傞乿偱偡丅
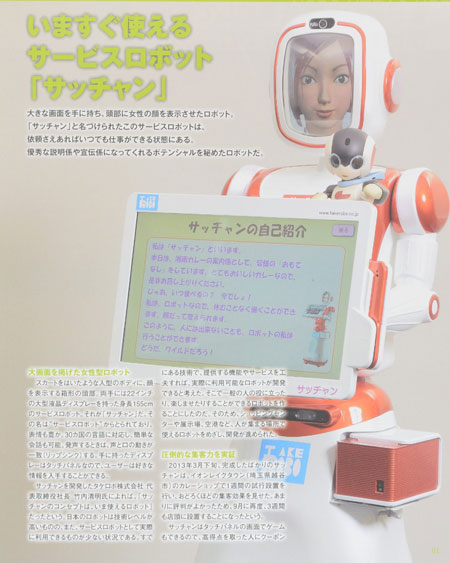
崱廡偺摿廤偼丄桪廏側愢柧學傗愰揱學偵側偭偰偔傟傞乽僒僢僠儍儞乿丅偡偛偔儗僩儘側報徾傕庴偗傑偡偑乮徫乯丄幚偼俁侽僇崙岅偵懳墳偟丄娙扨側夛榖傕壜擻偲偄偆嵟怴儘儃僢僩偱偡丅昞忣傕朙偐偵曄傢傝傑偡丅
係俆崋偺儘價傪慻傒棫偰
係俆崋偺慻傒棫偰売強丅嵍媟偺屢娭愡偱偡丅
係俆崋偺僷乕僣丅僒乕儃儌乕僞乕丅
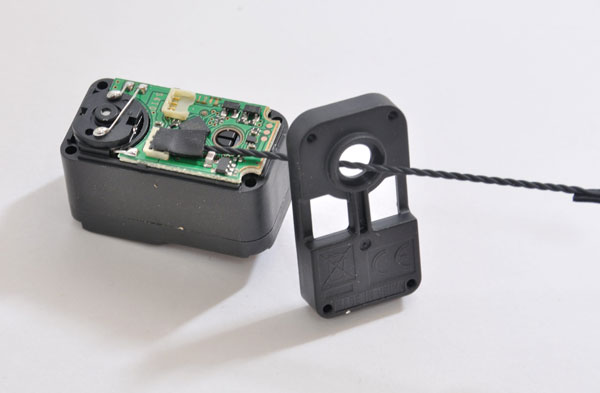
曐岇僔乕儖傪揬偭偨僒乕儃働乕僽儖傪梡堄偟丄曅曽偺僐僱僋僞乕傪婎斅偺僐僱僋僞乕偺侾曽乮偳偪傜偱傕壜乯偵丄恀忋偐傜梷偊偰愙懕偟傑偡丅

奜偟偨棤傆偨傪庢傝晅偗偰丄僱僕巭傔偡傟偽OK偱偡丅
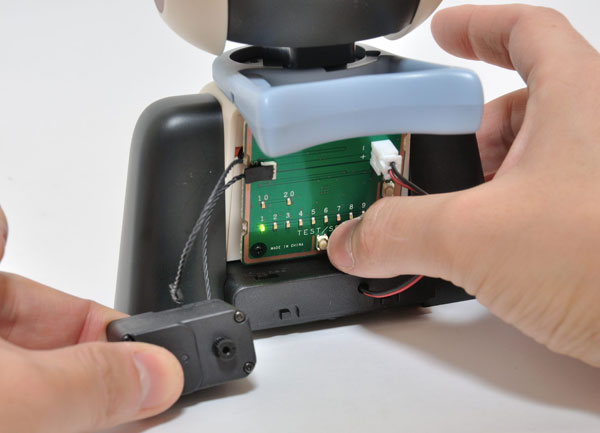
愭傎偳慻傒棫偰偨僒乕儃儌乕僞乕傪僥僗僩儃乕僪偵庢傝晅偗偰丄揹尮僗僀僢僠傪ON偟傑偡丅慡偰偺LED偑俀夞揰柵偟偨屻偵丄乽倀俹乿僗僀僢僠傪俇夞墴偟偰丄LED偺乽俈乿偑揰摂偟偨忬懺偵偟傑偡丅乽TEST/SET乿僗僀僢僠傪挿墴偟偡傞偲栺俁昩屻偵彂偒崬傒姰椆偟傑偡丅
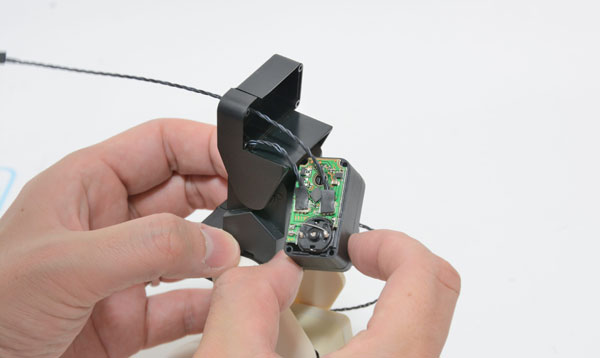
嵍媟傪梡堄偟丄嵍傂偞偐傜弌偰偄傞僒乕儃働乕僽儖傪丄崱崋偺僒乕儃儌乕僞乕偵愙懕偟傑偡丅

僒乕儃儌乕僞乕傪嵍傂偞偵杽傔崬傫偱丄係杮偺僱僕傪巭傔傟偽俷俲丅

嵍媟偑傎傏姰惉偟傑偟偨丅
崱崋偱丄椉榬偲椉懌偑傎傏姰惉偟丄偙傟傜偺慻傒棫偰偼偄偭偨傫廔椆偱偡丅師崋偐傜偼丄僶僢僥儕乕傗奺庬揹巕晹昳側偳偑採嫙偝傟丄椉榬偲椉懌偑惓忢偵摦偔偐偳偆偐傪僥僗僩偡傞偨傔偺弨旛偑巒傑傝傑偡侓
![]() 儘價偑婥偵側傞曽偼丄
儘價偑婥偵側傞曽偼丄廡姧儘價乮僨傾僑僗僥傿乕僯岞幃儁乕僕乯傪偛嶲徠偔偩偝偄丅
亂戞係係崋亃 嵍塃偺屢娭愡僼儗乕儉偺庢傝晅偗偲塃屢娭愡偺慻傒棫偰<<丂丂>>亂戞係俇崋亃 僶僢僥儕乕傪妋擣偡傞