

デアゴスティーニ Robi(ロビ) レビュー
ちょっと気になるデアゴスティーニの「Robi(ロビ)」のレビューをご紹介します。
毎週少しずつロビを作り上げていくのが楽しく、子供の頃にプラモデルを作った懐かしい記憶が蘇りますよ♪

【第11号】ロビの右肩関節を作る
第11号のロビ。今号では、ロビの右肩関節を組み立てます。
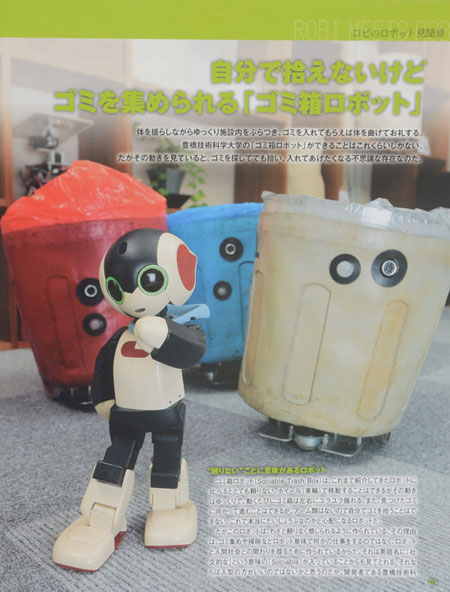
今週の特集は、体を揺らしながらゆっくり施設内をぶらつき、ゴミを入れてもらえば体を曲げてお礼する「ゴミ箱ロボット」。ホイールで移動することはできても、自分でゴミを拾うことができません(笑)。実はわざと頼りなく感じられるように作られているそうで、「ロボットと人間社会との関わりを探るために作られているから。」とのことでした。
11号のロビを組み立て
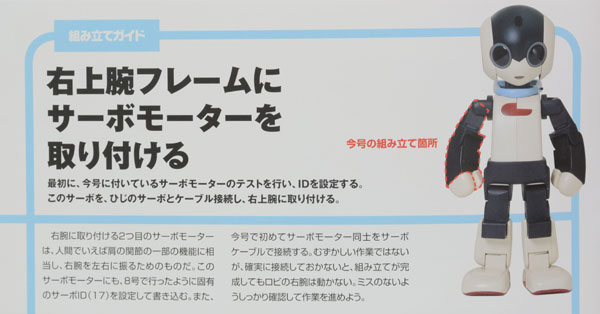
11号の組み立て箇所。サーボモーターのテストを行いIDを設定。その後、ひじのサーボとケーブルを接続し、右上腕に取り付けます。

今号のパーツ。サーボモーター1つだけと非常にシンプル。(笑)
サーボモーターが付属する号は毎回こんな感じですね。単価が高いからでしょうか。
サーボにサーボケーブルを接続する

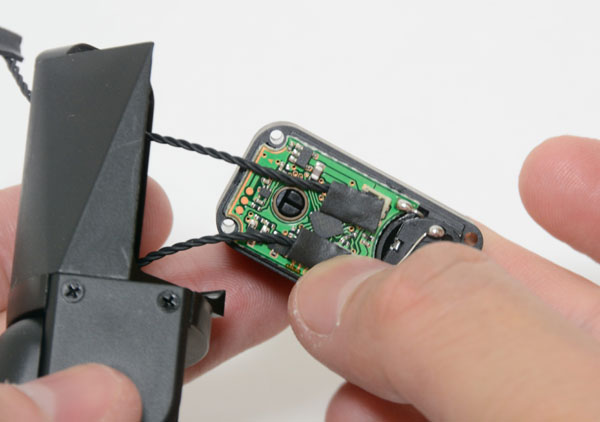
サーボモーターを用意し、ネジを全て抜きます。ネジを抜いたら、裏ぶたをゆっくり外します。

前号で作成したサーボケーブルを用意し、片方のコネクターを基板に取り付けます。
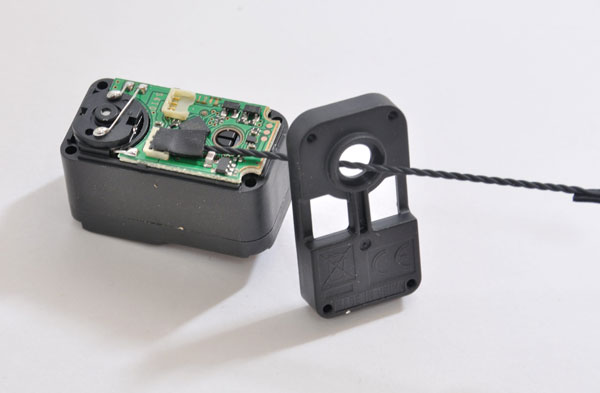
サーボケーブルを裏ぶたの丸い穴に通して、

最初に取り外したネジで再度固定します。以前の作業と同じなので、サクサク進みました。
サーボのテストをする

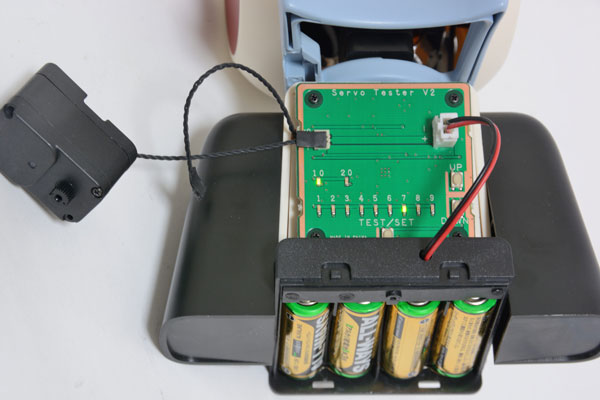
前号までに完成しているロビ本体を用意。

ロビ本体の電源スイッチがOFFになっていることを確認し、サーボケーブルのコネクタをテストボードのコネクタに接続します。
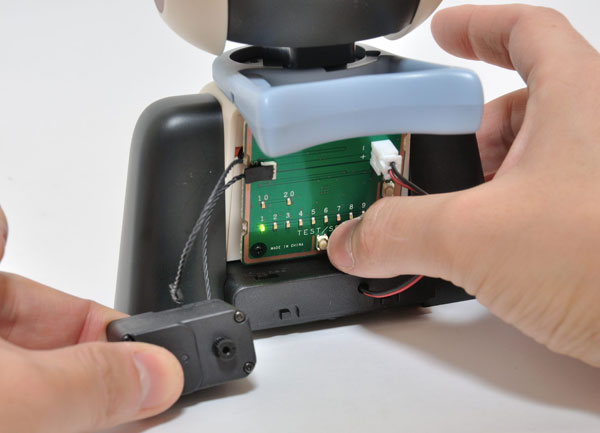
電源スイッチをONにすると、全てのLEDが2回点灯したあとに「1」だけが点灯します。確認できたら「TEST/SET」スイッチを押します。

サーボモーターのシャフトが、左45度→右45度→正面と回転して止まればOK。確認テスト完了です。
サーボIDを書き込む
サーボIDを書き込みます。8号で作業したID書き込みと同じなので作業は省略しますが、ID番号は8号と違う『17』にします。
2つのサーボを接続し取り付ける
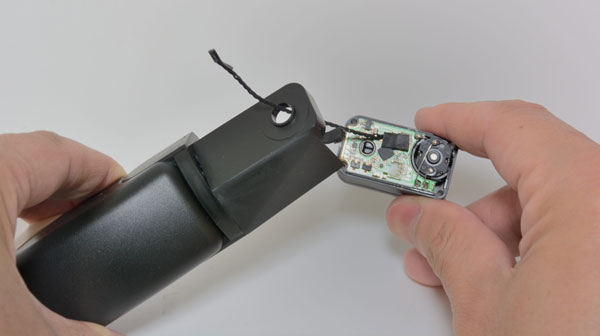
10号で組み立てた右腕を用意し、上腕フレームの丸い穴に、今号(11号)のサーボモーターのケーブルを通します。
ひじのサーボモーターから出ているケーブルを、今号のサーボモーターの片方のコネクタに接続します。ケーブルの長さが少し短く、かつ、私の指が太いので、この作業がやりづらいです。作業が完了したら、コネクタを横から見て、確実に平らに接続されてているかを必ず確認してください。

サーボモーターのシャフトを上にして、2本のケーブルをはさまないように気を付けながら、上腕フレームにピッタリはめます。

最後に、サーボモーターに付いていた長いネジ4本を使って、上腕フレームにサーボモーターを固定します。

今号までの完成状況。関節(サーボ)が2つできあがり、右腕が完成に近づきました。
今号の付属パーツはサーボモーター1つだけだったので作業量が少ないことを気にしてましたが、かなり楽しめました♪

早く腕の取り付け作業にならないかな〜♪
会話や動きを楽しめる未来型ロボット Robi(ロビ)が気になる方は公式サイトをチェック!
![]() ロビが気になる方は、
ロビが気になる方は、週刊ロビ(デアゴスティーニ公式ページ)をご参照ください。
【第10号】 右ひじ部分を作る<< >>【第12号】肩のパーツが完成!