

デアゴスティーニ Robi(ロビ) レビュー
ちょっと気になるデアゴスティーニの「Robi(ロビ)」のレビューをご紹介します。
毎週少しずつロビを作り上げていくのが楽しく、子供の頃にプラモデルを作った懐かしい記憶が蘇りますよ♪

【第14号】ロビの右腕がいよいよ完成!
第14号のロビ。今号は、「右ボディに右腕を取り付ける」です。

今週の特集は、2000年に登場した二足歩行ロボットの「アシモ」。人が入っているのではないかと錯覚してしまうほど、なめらかでチャーミングな動きは当時大きな話題を呼びました。

発売から2001年、2002年、2004年、2005年、2007年とアシモの研究は続いており、現在は2011年に新型アシモが登場しています。とっさに足を出して姿勢を保つ、周囲の人の動きや状況を予測する、集めた情報から自分で次の行動を判断するなど、かなり我々に近いですね。(驚)
14号のロビを組み立て
14号の組み立て箇所。右ボディに右腕を取り付けます。今号で右腕の組み立てが完了します!

14号のパーツ。右ボディカバー、サーボホーン、ネジです。

12号で組み立てた右腕と13号で組み立てたサーボモーターを使います。
右腕をボディに差し込む

今号に付属している右ボディカバーと12号で組み立てた右腕を用意します。

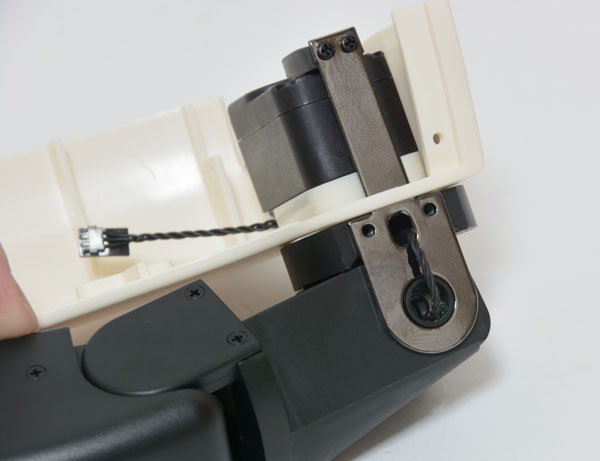
右腕から出ているサーボケーブルを右ボディカバーの穴に通して、仮固定しておきます。

サーボホーン(写真のように表裏を注意)を用意して、

サーボモーターに取り付けます。

13号で組み立てたサーボモーターを用意して、カバーを外し、

右ボディカバーの穴から出したサーボケーブルに接続します。
右腕をボディに差し込む

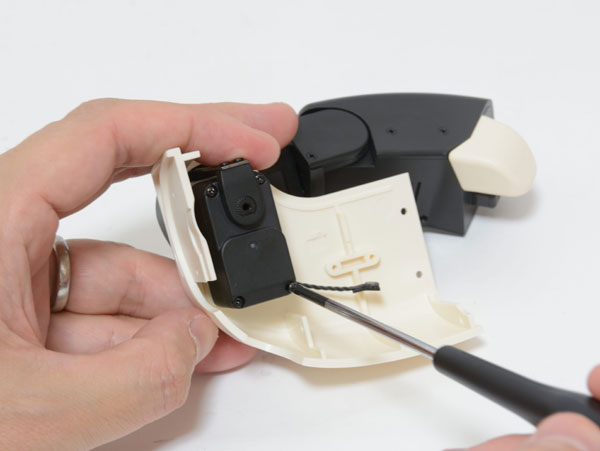
サーボケーブルを接続したら、サーボケーブルを中に閉じ込めるようにサーボモーターを上からかぶせます。ケーブルを挟むと断線してしまう可能性があるので要注意です!

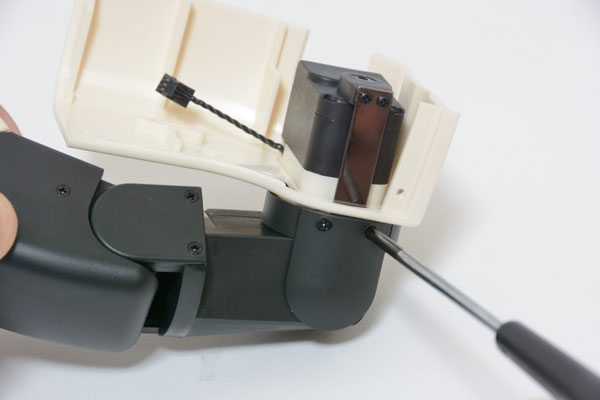
肩連結金具とサーボホーンを2つのネジで慎重に固定し、
先ほどのサーボケーブルの調整を行うために、12号で取り付けた肩パネルの2本のネジを抜き、肩パネルを取り外します。
肩から出ているサーボケーブルのたるみを調整して、肩パネルを元に戻せばOK!
最後にサーボモーターをネジ止めすれば完成!

ロビの右腕がとうとう完成しました!

肩を持って腕を動かしてみると、「ウィーン。ウイーン。」というモーター音が鳴ります。早く動いて欲しい!!
会話や動きを楽しめる未来型ロボット Robi(ロビ)が気になる方は公式サイトをチェック!
![]() ロビが気になる方は、
ロビが気になる方は、週刊ロビ(デアゴスティーニ公式ページ)をご参照ください。
【第13号】まだまだ続く・・・サーボモーターの書き込み<< >>【第15号】いよいよ左前腕に突入!