デアゴスティーニ Robi(ロビ)のレビューをご紹介!デアゴスティーニ Robi(ロビ)の購入を検討されている方は、ご参考にどうぞ。


デアゴスティーニ Robi(ロビ) レビュー
ちょっと気になるデアゴスティーニの「Robi(ロビ)」のレビューをご紹介します。
毎週少しずつロビを作り上げていくのが楽しく、子供の頃にプラモデルを作った懐かしい記憶が蘇りますよ♪

【第30号】 右ひざの関節を組み立てる

第30号のロビ。今号は「左前腕を完成させる」です。
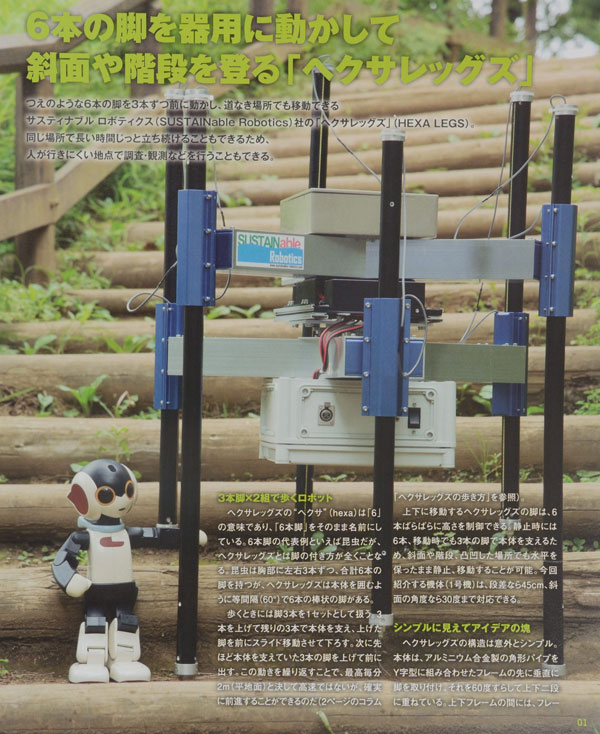
今週の特集は、6本の脚を器用に動かして斜面や階段を登る「ヘクサレッグズ」。段差なら45cm、斜面の角度なら30度まで対応できるとのこと。
30号のロビを組み立て
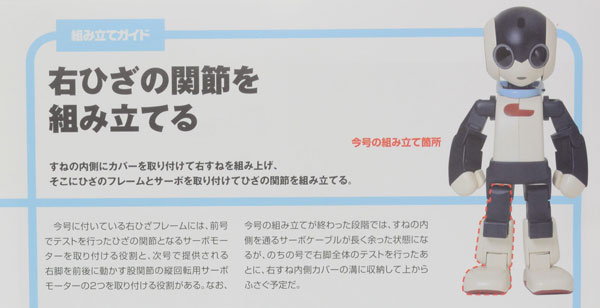
30号の組み立て箇所。右ひざの関節を組み立てる。

30号のパーツ。初めて見るパーツですね。
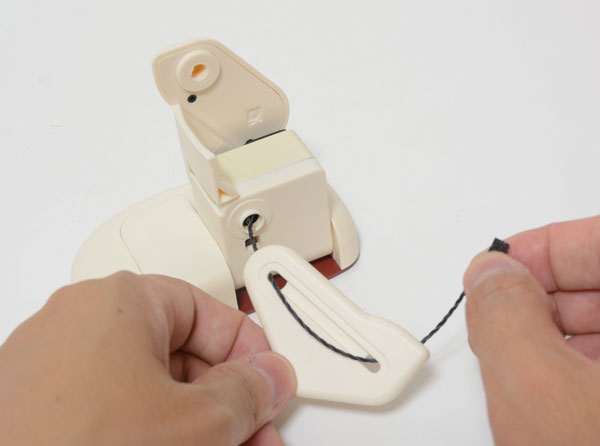
前号まで組み立てた右足を用意し、サーボケーブルを右すね内側カバーに通します。
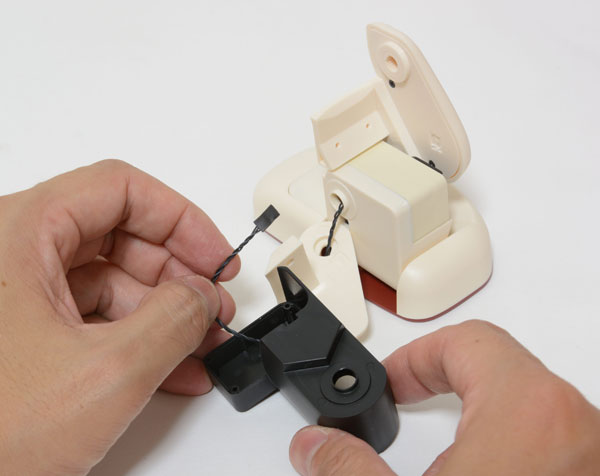
右ひざフレーム(黒)を用意し、サーボケーブルを通します。

前号まで組み立てたサーボモーターを用意し、サーボケーブルと接続します。
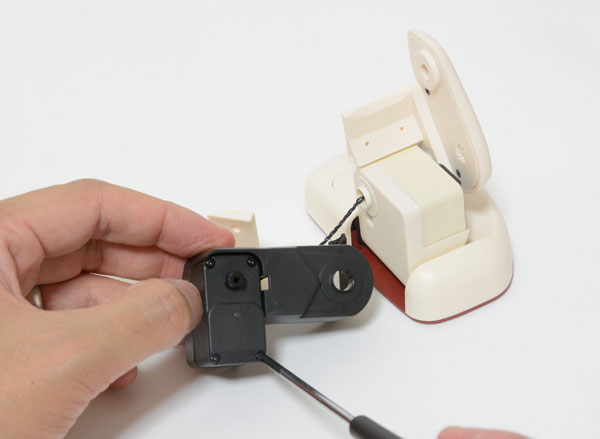
右ひざフレームにサーボモーターをネジ止めします。

サーボモーターを右足本体に取り付け、

右すね内側カバーを取り付け、
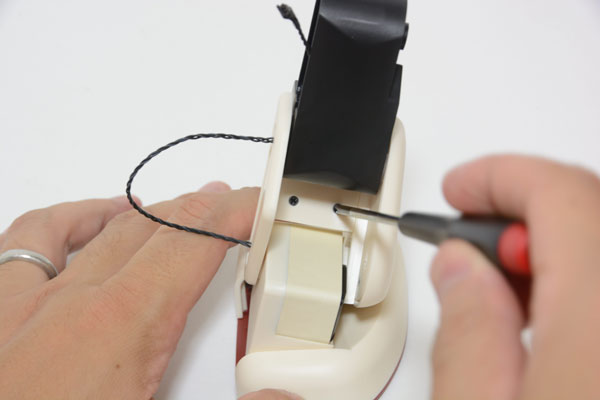
写真のように内側からネジ止めします。

右ひざの関節の取り付けが完成しました。足らしくなってきましたね♪
![]() ロビが気になる方は、
ロビが気になる方は、週刊ロビ(デアゴスティーニ公式ページ)をご参照ください。
【第29号】 右ひざサーボのテストを行い、IDを書き込む<< >>【第31号】 股関節(縦回転)サーボにIDを書き込み、右脚に取り付ける